Support
To get instructions on how to set up your new Alkeria camera, we suggest you watch the Quick Installation Guide video. You'll be guided step by step through the first-run procedure.
Then, if you need more detailed information on how to get an advanced setup, please check the Resource page: there you can find dedicated tutorials and guides.
If you're having trouble during the camera's first setup, we suggest you get in contact with Alkeria Support Team.
You can ask for assistance through the form in the Support section that you can find in your User Area. Our Support Team will get in contact with you as soon as possible, to take care of your request.
Just send a support request through the dedicated form on your website's User area.
There you can choose to be assisted through a Skype call or a remote desktop session.
Please, get in contact with our Alkeria Support Team, giving them as many details as possible regarding your vision system and the application in which it is used.
Our Support Team is available to help you in setting up properly your camera, working together with you to reach the best result possible.
It depends on which kind of precision you need.
For example, if you need to perform an edge detection process on a very jagged object, a higher resolution sensor will definitely increase your performance.
Problems like dark areas or noise can be caused by poor or inadequate lighting, or by wrong gain and exposure settings.
To avoid these problems, we suggest setting up gain and exposure values correctly, therefore using a proper illumination system providing powerful and consistent lighting.
PRNU means Photo Response Non-Uniformity.
It indicates the difference in response of the different sensor's pixels when hit by a uniform light source.
DSNU means Dark Signal Non-Uniformity.
It indicates the different base values of each pixel (black level) compared to the average value of the entire sensor.
Bayer color pattern defines the order in which the three primary colors (red, green, and blue) are arranged on a digital sensor color filter.
Usually, single-sensor color cameras use a monochrome sensor with a color filter applied on top: Bayer pattern defines which color cover each sensor's pixel.
Once the is acquired, a subsequent demosaicing process reconstructs the entire image by interpolation. This way it's possible to get color images with a single image sensor.
The signal-to-noise ratio is the ratio between the amount of light converted into an electrical signal by a sensor and the noise of the sensor itself.
In theory, an image sensor converts a given amount of light in a precise tension value: however, in reality, many factors affect sensor performances, such as working temperature or EMI. The difference between the ideal and the real signals is defined as noise.
Usually, this value is given in dB, according to this formula:
SNR = 20 logs (signal/noise)
You can improve the signal-to-noise ratio by reducing the causes of the noise: for example preventing electronic interference and using only shielded cables.
RGB color space is an addictive color model, defining each color as a sum of the three primary colors (red, green, and blue).
The choice of red, green, and blue as primary colors is based on the human eye structure: in fact, our eyes have receptors that are sensitive to these three colors' wavelengths.
Due to its characteristics, RGB is a particularly suitable model for image representation on electronic devices.
Drivers and software for Alkeria cameras are freeware: you can download them from your User Area, on our website.
When you buy an Alkeria camera, you will receive access to your new User Area on our website. In there you can find all the necessary resources to use your new camera: manuals, technical guides, drivers, SDKs, vision libraries, and many code examples.
YUV is a color space used for image and video encoding, that uses one luma (Y) and two chrominance (U, V) components.
It is commonly used to encode RGB information by extracting a high-resolution luminance signal and two chrominance components which can be compressed to reduce the total bandwidth used.
Generally electronic devices, as well as Alkeria cameras, are designed to operate up to 70°C.
A temperature sensor is integrated into each Alkeria camera, for monitoring the camera's internal temperature: if high temperatures are recorded, a protection system puts the camera on standby, in order to prevent breakages and malfunctions.
High temperatures may affect the noise level on some sensors.
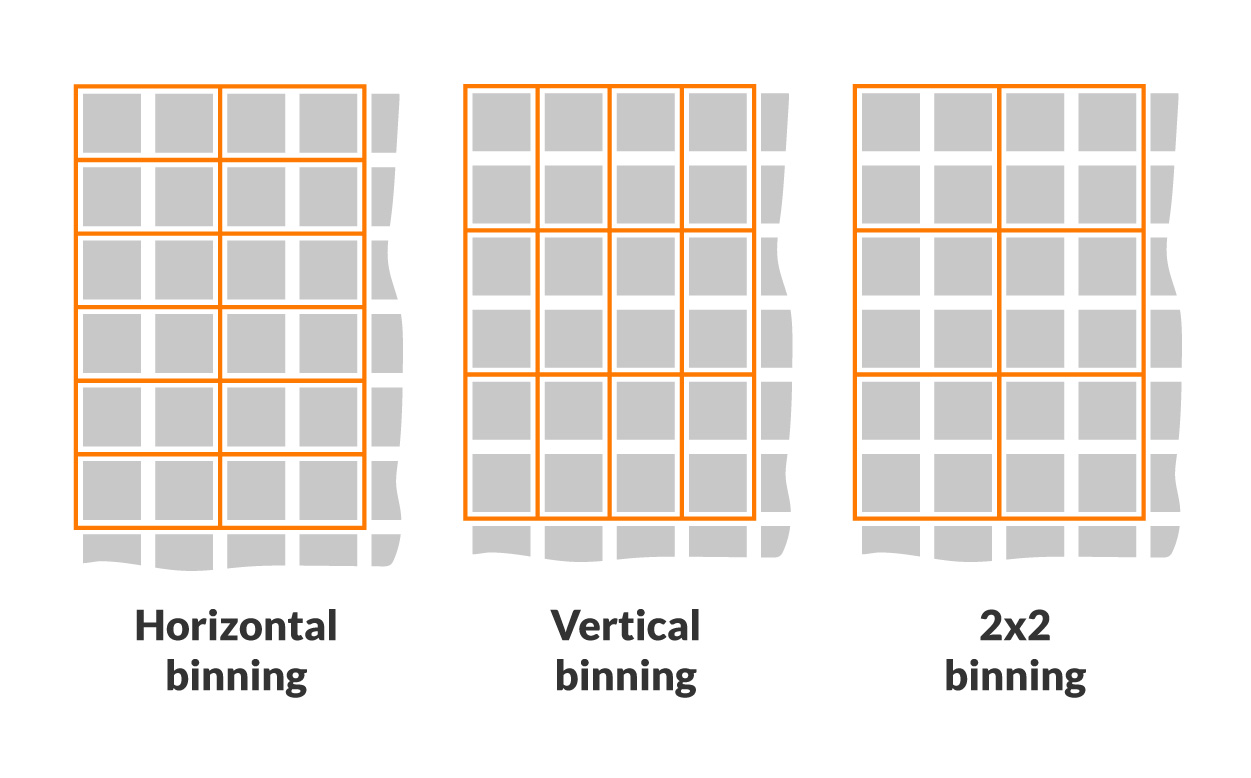 It is an internal function of the cameras, that allows you to combine the value recorded by two or more adjacent pixels, according to a predetermined pattern.
It is an internal function of the cameras, that allows you to combine the value recorded by two or more adjacent pixels, according to a predetermined pattern.
When using this feature, the resolution is reduced, but you can obtain improvements in sensitivity, dynamic range, acquisition speed, and image noise.
For example, with 2x2 binning resolution is halved -since the values of 4 adjacent pixels are added together- but sensitivity and dynamic range are quadrupled, image noise is reduced to a quarter and the acquisition rate is doubled.
Calibration process allows for an increase in the quality level of images acquired by a line scan camera.
Calibration is necessary because each sensor pixel has slight irregularities in light response: calibration procedure allows to get a uniform light response across all the pixels.
To find out how you can perform a camera calibration, please watch the Necta Calibration Wizard - part 1 video.
No, you can't. All the Alkeria cameras must be powered ONLY through the USB3 interface.
Alkeria cameras are compatible with any USB3 interface.
However, to get the maximum performance from the cameras, you need to choose a proper USB3 controller.
To learn more about this topic, we recommend you to read the related section on the Accessories page.