Dizionario
È un dispositivo che, analizzando oggetti reali, acquisisce dati relativi alla loro forma e colore.
I dati acquisiti, poi, possono essere utilizzati per costruire un modello digitale tridimensionale degli stessi oggetti.
Un adattatore per lenti a passo C con baionetta a vite. La filettatura ha un diametro nominale di 24,5 mm (1 pollice) e 32 giri per pollice.
L'adattatore utilizza una flangia per portare il piano focale ad una distanza di 17,526 mm (0,69 pollici).
Processo che permette di utilizzare le informazioni sul colore acquisite dalla telecamera per identificare parti, prodotti ed oggetti; valutare la qualità dei prodotti; cernere e scartare prodotti.
Un dispositivo elettronico che converte una grandezza analogica in una grandezza digitale proporzionale.
L'angolo di visuale (o FOV, da Field Of View) è la porzione d'immagine che viene inquadrata in un dato momento dall'obiettivo di un sistema di visione.
L'angolo di visuale dipende dalle caratteristiche ottiche dell'obiettivo, dalle specifiche del sistema e dalla distanza tra l'oggetto e la telecamera.
Un set di istruzioni che permette al software di comunicare con le telecamere o l'hardware in generale.
Indica l'area del sensore attivata durante l'acquisizione.
Le dimensioni e la posizione di quest'area possono essere personalizzati dall'utente: durante l'acquisizione, solo le informazioni dei pixel all'interno dell'area specificata vengono trasmesse dalla telecamera.
Questo processo è utile nelle applicazioni in cui le informazioni ricercate sono all'interno di una porzione limitata dell'immagine.
Una riduzione della AOI porta infatti ad avere velocità di acquisizione più elevate ed immagini più facili da elaborare, dal momento che il volume di dati acquisiti è minore rispetto a quello generato dal sensore a piena risoluzione.
Le Area Scan cameras, o dette anche telecamere matriciali, sono dispositivi di acquisizione di immagini equipaggiate con sensori rettangolari, contenenti più linee di pixel che vengono esposte simultaneamente (a differenza delle telecamere lineari).
È una matrice regolare di filtri di colore rosso, verse e blu, posta al di sopra dei pixel del sensore.
Ogni pixel è coperto da un singolo colore: i pixel confinanti sono invece coperti dagli altri due colori, secondo una disposizione ben precisa.
È una regolazione che consente di bilanciare il colore dell'immagine, portando la temperatura colore a valori naturali.
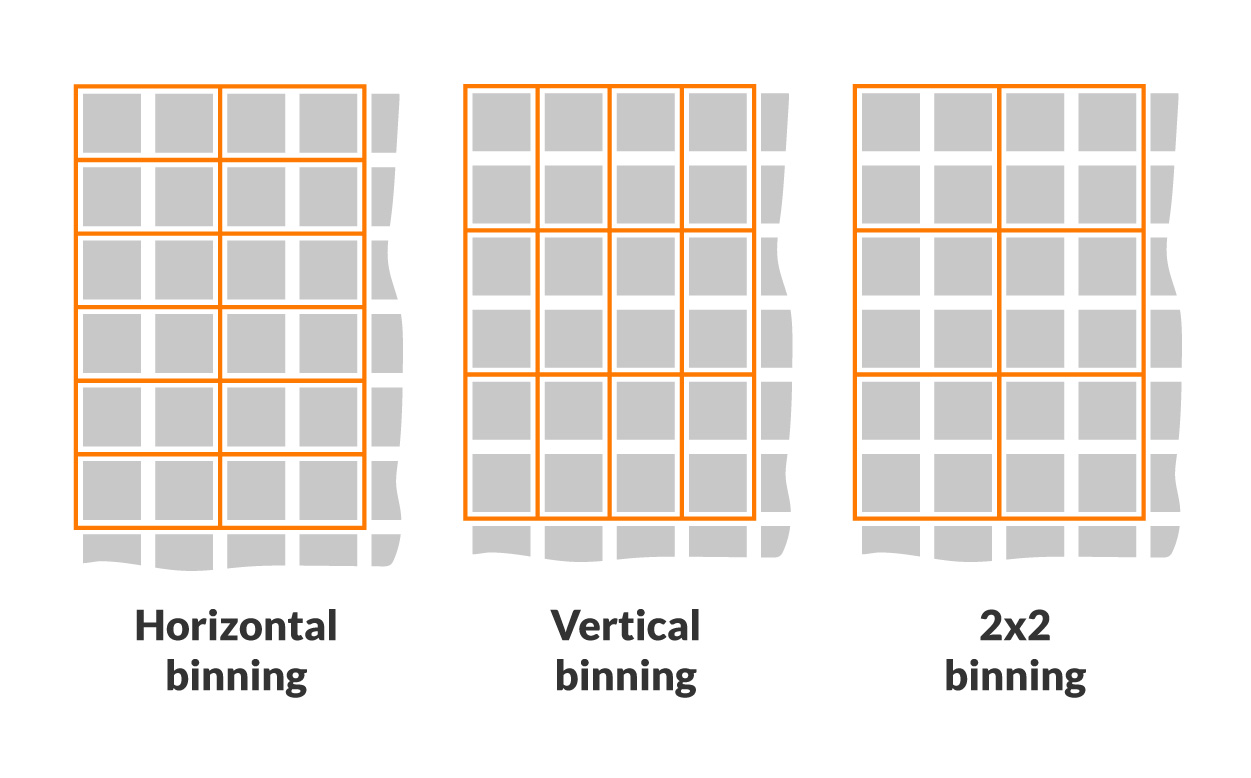 È la capacità della telecamera di combinare il segnale di pixel adiacenti secondo un pattern specifico (per righe, colonne o in 2x2 o 4x4). Utilizzando questa funzionalità la risoluzione finale dell'immagine si riduce, ottenendo però altri benefici: nel caso del binning 2x2 ad esempio la risoluzione è dimezzata, ma la sensibilità ed il range dinamico quadruplicano, il framerate raddoppia ed il rumore è ridotto a un quarto.
È la capacità della telecamera di combinare il segnale di pixel adiacenti secondo un pattern specifico (per righe, colonne o in 2x2 o 4x4). Utilizzando questa funzionalità la risoluzione finale dell'immagine si riduce, ottenendo però altri benefici: nel caso del binning 2x2 ad esempio la risoluzione è dimezzata, ma la sensibilità ed il range dinamico quadruplicano, il framerate raddoppia ed il rumore è ridotto a un quarto.
Lo studio e l'applicazione di metodi che permettono ad un computer di interpretare il contenuto di un'immagine.
In un'immagine il contrasto è il rapporto che intercorre tra il sui punto più luminoso ed il suo punto più scuro.
Questo tipo di rumore è causato dagli elettroni che possono essere generati in maniera casuale nel sensore a causa di effetti termici. Il numero di elettroni, così come il relativo rumore, crescono all'innalzarsi della temperatura e del tempo di esposizione.
Un sensore d'immagine standard acquisisce i sensori in bianco e nero. Per ottenere immagini a colori è necessario l'uso di un filtro colori con un pattern prestabilito.
Il pattern utilizzato più frequentemente è quello di Bayer, coinvolto in un processo detto Bayering: ogni singolo pixel acquisisce solamente il livello di luminosità relativo al colore del filtro con cui è ricoperto, componendo così l'immagine come una sorta di "mosaico" composto di soli colori primari (rosso, verde e blu).
Per produrre un'immagine a color che sia corretta, i valori di ciascun pixel vengono completati interpolando i valori dei due colori primari mancanti dai pixel confinanti: l'algoritmo che consente questa operazione prende il nome di Debayering o Demosaicizzazione.
La Demosaicizzazione può essere effettuata sia direttamente dalla telecamera, che successivamente durante la post-produzione delle immagini grezze.
In ambito fotografico indica il diametro dell'apertura del diaframma interno alle lenti fotografiche.
Il diaframma può essere regolato per controllare la quantità di luce in ingresso nel dispositivo, che andrà a colpire il sensore.
I difetti dei pixel si possono raggruppare in tre categorie: hot, warm e dead pixel.
Hot pixels sono elementi sempre in saturazione, ovvero restituiscono sempre il massimo segnale (ad es. bianco pieno) in qualsiasi condizione di luce.
Dead pixels al contrario, sono elementi che restituiscono un segnale sempre pari a zero.
Warm pixels producono un segnale casuale. Questa tipologia di difetti sono indipendenti dalle condizione di luce e dal tempo di esposizione, per cui possono essere facilmente individuati e rimossi.
Un tipo di attacco a baionetta per obiettivi, creata da Nikon. Questo attacco ha una flangia per portare la distanza del piano dell'immagine è di 46,5mm (1,83 pollici)
Una FPGA è un circuito integrato progettato per poter essere programmato e configurato anche dagli utenti finali.
Molte FPGA possono essere riprogrammate in modo da integrare diverse funzioni logiche, consentendo così un'elaborazione dei dati flessibile e riconfigurabile direttamente a bordo del dispositivo.
Una non omogeneità dell'immagine dovuta al disallineamento delle prestazioni nei circuiti dei vari pixel.
Il formato di un'immagine è il rapporto tra la sua larghezza e la sua altezza (espressa solitamente come x:y)
Frame Per Second, frame al secondo. Questa è l'unità di misura per la velocità di acquisizione dei frame in una data unità di tempo, ovvero quante immagini la telecamera riesce ad acquisire ed elaborare ogni secondo.
Il frame rate, misurato in FPS, descrive il numero di immagini che sono acquisiti nell'unità di tempo.
Un frame rate più elevato è consigliato nel caso in cui sia necessario acquisire immagini di oggetti in movimento senza effetto mosso, mantenendo alta la qualità d'immagine.
Il framerate deve essere definito a seconda dell'applicazione.
Questo indice si riferisce alla carica massima che un pixel può acquisire prima saturi, eccedendo sui pixel adiacenti causando il cosiddetto blooming.
Sia la Full Well Capacity che la Dark Noise sono decisivi per la determinazione del Range Dinamico di un sensore.
Il Gain è la misura dell'abilità di incrementare l'ampiezza di un segnale tra le porte di input e di output.
In una telecamera digitale rappresenta la modalità per incrementare il segnale acquisito dal sensore d'immagine. L'incremento dei Gain restituisce immagini più luminose, incrementando però al contempo anche il rumore d'immagine.
Questo tipo di rumore è causato dalla differenza di comportamento dei vari pixel, in termini di sensibilità e guadagno. Questo è un esempio di "rumore costante" che può quindi essere misurato ed eliminato.
Ispezione automatica di immagini per la ricerca di macchie all'interno di aree uniformi.
Le interferenze elettromagnetiche sono radiazioni elettromagnetiche emesse da circuiti elettrici durante il loro normale funzionamento, che inducono disturbi e segnali indesiderati in altri circuiti.
Nella grafica e fotografia digitale, l'istogramma fornisce la rappresentazione in modo grafico della distribuzione tonale di un'immagine digitale, fornendo in un'unica visuale la distribuzione tonale della stessa.
L'istogramma è ottenuto contando il numero di pixel per ciascun colore primario che registra un determinato valore tonale, rappresentando tali valori poi su un grafico 2D.
L'asse orizzontale del grafico rappresenta le variazioni tonali, mentre l'asse verticale rappresenta il numero di pixel per ogni singolo tono.
Un'immagine, o la porzione di un'immagine, è detta "a fuoco" se la radiazione della luce riflessa dalla scena converge perfettamente all'interno dell'obiettivo; al contrario, una scena non è a fuoco quando la radiazione non converge.
La differenza tra queste due condizioni viene spesso determinata tramite il criterio del circolo di confusione.
La scienza che si occupa della misurazione e delle sue applicazioni.
È un campo con moltissime applicazioni legate alla machien vision.
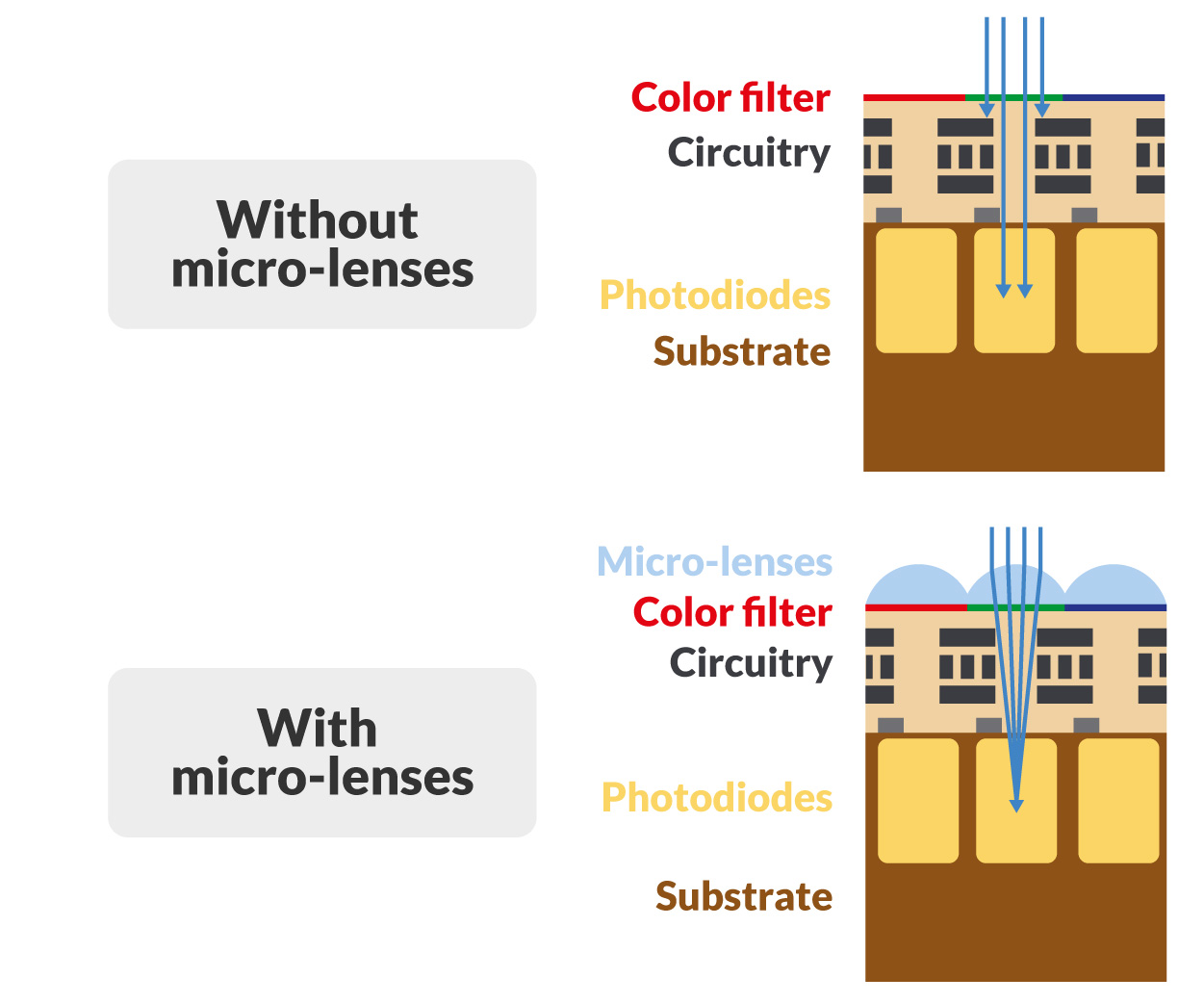 Specialmente nei sensori CMOS, ogni area attiva del pixel è circondata dalla circuiteria e dalle connessioni necessarie per l'acquisizione delle immagini: queste strutture elettriche vanno a diminuire la quantità di luce che può raggiungere il singolo fotodiodo.
Specialmente nei sensori CMOS, ogni area attiva del pixel è circondata dalla circuiteria e dalle connessioni necessarie per l'acquisizione delle immagini: queste strutture elettriche vanno a diminuire la quantità di luce che può raggiungere il singolo fotodiodo.
Se poi i raggi luminosi non sono perpendicolari alla superficie del sensore, possono essere addirittura riflessi e non catturati.
Per evitare questo inconveniente, i moderni sensori d'immagine sono ricoperti da uno strato di micro- lenti: queste focalizzano i raggi luminosi sulla superficie attiva del pixel, incrementandone quindi la sensibilità.
Original Equipment Manufacturer (OEM): indica un'azienda che produce parti e componenti, vendendoli poi ad un'altra azienda che li vende con il proprio marchio.
La sigla OEM si riferisce all'azienda che realizza la produzione.
L'otturatore è un dispositivo che regola il passaggio della luce in un periodo predeterminato di tempo. Consente di controllare con precisione il tempo di esposizione del sensore, in modo da acquisire la giusta quantità di luce per l'acquisizione di un'immagine.
Con pixel ci si riferisce alla minima area unitaria che compone un'immagine digitale.
In ottica, la profondità di campo indica la distanza massima e minima entro la quale un soggetto risulta a fuoco.
Indica la percentuale di fotoni effettivamente convertiti in elettroni ad una data lunghezza d'onda.
Il Range Dinamico è il rapporto tra il segnale massimo e minimo che un sensore riesce ad acquisire.
Indica la capacità di un sensore di acquisire correttamente l'immagine di un'area che presenta sia zone molto scure che molto chiare, con il minimo rumore o interferenza.
Il Range Dinamico è solitamente espresso dal logaritmo del rapporto massimo-minimo, sia in base 10 (decibel) che in base 2 (stop).
Il rapporto segnale-rumore (spesso abbreviato con SNR o S/N) è il rapporto tra il segnale massimo e il rumore generale, misurato in dB.
Il calore massimo dell'SNR è limitato dall rumore shot (che dipende dalla natura fisica della luce ed è pertanto inevitabile) e può essere approssimato come
![]()
SNR dà un'indicazione riguardo al livello dei grigi che sono rilevanti durante la conversione di un segnale analogico (o continuo) in uno digitale (o discreto).
Il termine ROI indica l'area del sensore attivata durante l'acquisizione dell'immagine.
L'area può essere determinata dall'utente sia in dimensioni che in posizione: durante l'acquisizione, solo i pixel all'interno dell'area specificata saranno attivi e trasmetteranno le informazioni acquisite.
Questa impostazione può risultare comoda quando le informazioni rilevanti si trovano in una porzione dell'immagine.
La riduzione della regione acquisita poi può portare alcuni vantaggi, tra cui una velocità di acquisizione più alta ed un tempo di elaborazione più breve, dal momento che il volume di dati è ridotto.
Il modello colore RGB si basa sul modello additivo secondo cui i tre colori primari (rosso, verde e blu) possono essere combinati tra di loro per creare altri colori.
I sensori d'immagine sono in grado di campionare la luce solo sottoforma di toni di grigio. Per ottenere immagini a colori, ogni singolo pixel viene ricoperto da un apposito filtro di colore rosso, verde o blu,. secondo un pattern predefinito (ad es. il pattern di Bayer): in questo modo, durante l'acquisizione di un'immagine, ogni pixel restituirà il livello di luminosità relativo al colore del filtro applicato. Tramite un'interpolazione con i pixel vicini, viene poi ricostruita l'intera immagine a colori.
Un'altra tecnologia di ricostruzione del colore prevede l'utilizzo di un singolo sensore per ciascuno dei tre colori primari.
Il rilevamento dei bordi è una tecnica di riconoscimento automatico del contorno di un oggetto: viene eseguita estrapolando un'insieme di punti dall'immagine, in cui l'intensitò luminosa cambia repentinamente.
Descrive l'abilità di un sistema di distinguere, individuare e/o registrare i dettagli fisici tramite mezzi elettromagnetici.
Questi sistemi possono essere di tipo imaging (ad es. una telecamera) o non-imaging (ad es. un quad-cell laser detector).
La certificazione RoHS (Restriction of Hazardous substances) definisce e regola l'utilizzo di sostanze pericolose per l'ambiente all'interno dei prodotti (ad es. piombo, cadmio, cromo esavalente, mercurio ecc.)
Il rumore è una variazione casuale della luminosità o del colore all'interno di un'immagine, ed è solitamente legata al rumore elettronico.
Può essere generata da fattori sia geometrici, che fisici, che elettronici, e può essere distribuita in maniera costante che casuale all'interno dell'immagine.
Questa tipologia di rumore è legata all'errore che si genera nella conversione da analogico a digitale dei valori del potenziale elettrico.
È il processo di divisione di un'immagine digitale in regioni significative, per semplificare e/o modificare la rappresentazione delle immagini in modo che siano più facile da analizzare.
La sensibilità è un parametro che quantifica la risposta del sensore alla luce. È strettamente connessa alla quantum efficiency.
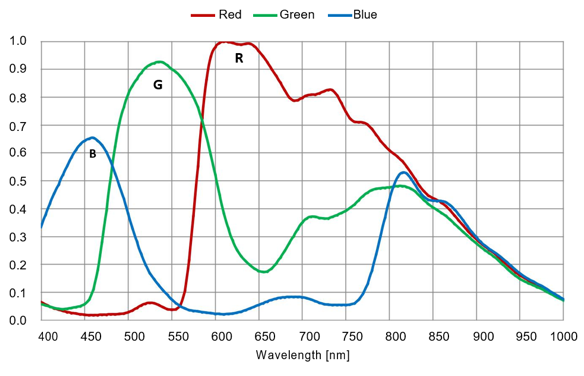 È un parametro che descrive l'efficienza con cui il sensore registra l'intensità della luce a varie lunghezze d'onda.
È un parametro che descrive l'efficienza con cui il sensore registra l'intensità della luce a varie lunghezze d'onda.
I sistemi per machine vision, che spesso utilizzano telecamere CCD o CMOS, analizzano lunghezze d'onda tra i 350 ed i 900 nm, con una zona di picco centrale tra i 400 ed i 650 nm.
Esistono poi diverse tipologie di sensori che permettono di coprire lo spettro UV così come l'infrarosso.